




Úvod do AUTOSARu a jeho nasadenie v automobilovom priemysle




Poďme spoločne vytvárať špičkové riešenia.
GlobalLogic prináša jedinečné skúsenosti a odborné znalosti spájajúce dáta, dizajn a vývoj špičkových riešení.
Ozvite sa námPredtým neexistovala žiadna jednotná softvérová architektúra, ktorú by používali automobilový výrobcovia (OEM – Original Equipment Manufacturer) na návrh softvéru pre ECU. Takže vždy, keď chcel OEM prejsť na nového dodávateľa komponentov, bol tento prechod veľmi ťažký. Nový dodávateľ čelil obrovským výzvam pri pochopení existujúcej softvérovej architektúry, hardvérových platforiem a noriem používaných pri vývoji softvéru pre ECU. Preto bolo takmer nemožné, aby nový dodávateľ pokračoval v rozbehnutom projekte napríklad od polovice jeho výrobného cyklu.
S cieľom zefektívniť koordináciu medzi OEM výrobcami a ich dodávateľmi, zlepšiť kvalitu softvéru ECU a skrátiť čas a náklady na vývoj sa v roku 2003 spojili dodávatelia automobilového priemyslu, výrobcovia polovodičov, dodávatelia softvéru a nástrojov a vytvorili konzorcium s názvom AUTOSAR. Zakladajúcimi členmi boli BMW, Bosch, Continental, Daimler AG, Siemens VDO, a Volkswagen. Neskôr sa pridali Ford Motor Company, PSA Peugeot Citroen a Toyota Motor Corporation.
Čo je AUTOSAR?
AUTOSAR je otvorená a štandardizovaná softvérová architektúra pre automobilový priemysel, ktorá poskytuje štandardy pre vývoj softvérových aplikácií, zjednocuje rozhrania medzi aplikačným softvérom a základnými funkciami vozidiel a pomáha vytvárať spoločnú softvérovú architektúru ECU pre všetkých členov AUTOSAR konzorcia. Je to stále rastúci a vyvíjajúci sa štandard, ktorý definuje vrstvovú softvérovú architektúru. Najznámejší dodávatelia AUTOSAR riešení a vývojových nástrojov sú Vector, Elektrobit a ETAS.
AUTOSAR v konečnom dôsledku prináša výhody pri manažovaní čoraz zložitejších elektrických/elektronických (E/E – Electric/Electronic) prostredí vo vozidle, ako je napríklad jednoduchá integrácia, zmena funkcií v rámci komplexnej sieti ECU a riadenie celého životného cyklu výrobku.
Architektúra AUTOSAR
Nižšie vysvetlená architektúra je tzv. klasická AUTOSAR verzia, ktorá podporuje vykonávanie funkcií v reálnom čase pričom berie do úvahy bezpečnostné obmedzenia. Klasický AUTOSAR je rozdelený do týchto 3 hlavných vrstiev (v poradí zhora nadol):
- Aplikačná vrstva
- AUTOSAR runtime prostredie (RTE)
- Základný softvér (BSW)
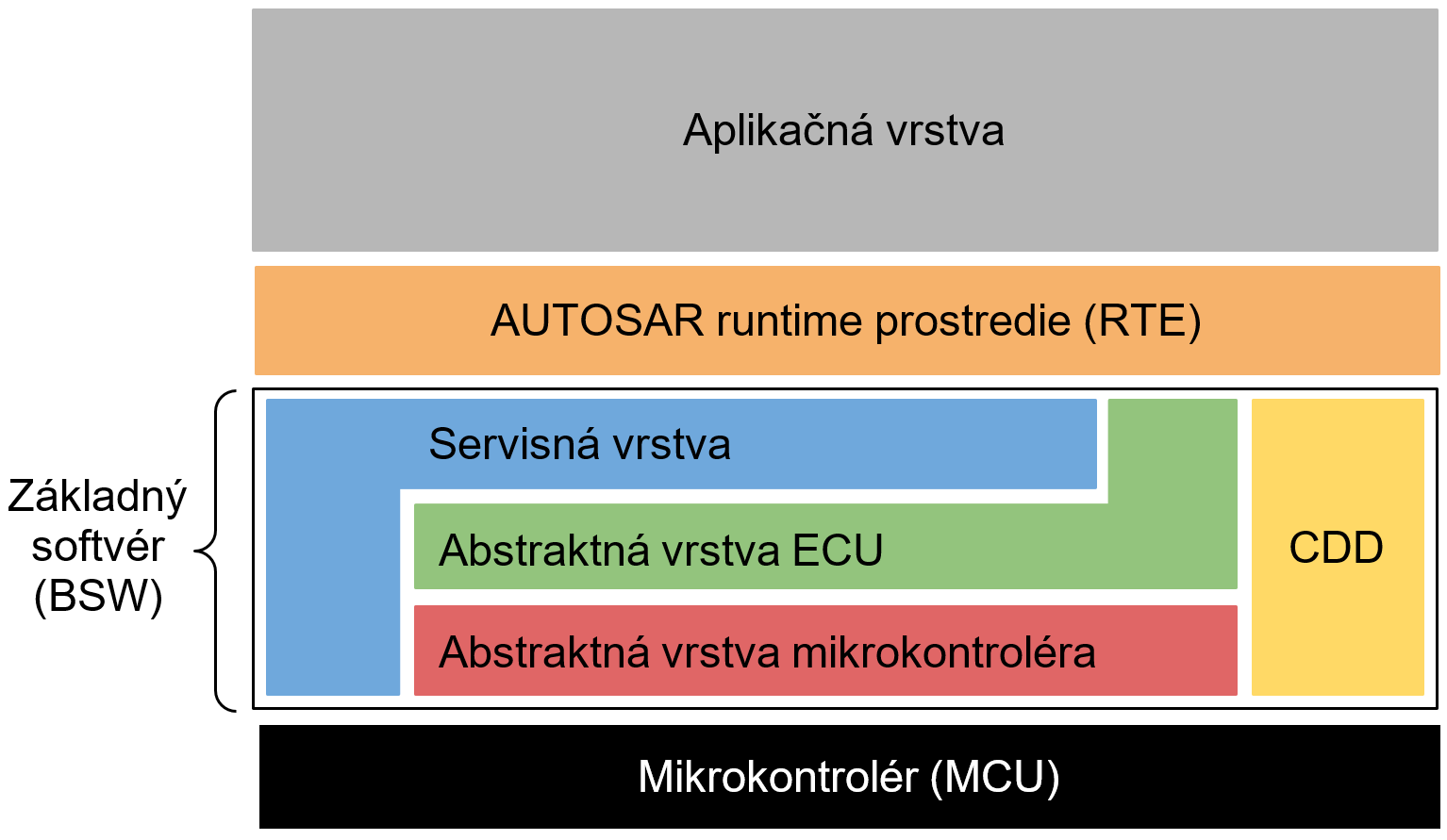
Obr. 1. AUTOSAR architektúra
Zdroj: https://circuitdigest.com/article/understanding-autosar-and-its-architecture
Aplikačná vrstva
Aplikačná vrstva je najvyššou vrstvou softvérovej architektúry AUTOSAR a podporuje implementáciu užívateľských funkcií a aplikácií na realizáciu konkrétnej funkcionality vozidla. Táto vrstva pozostáva z tzv. softvérových komponentov, ktoré vykonávajú špecifické úlohy podľa požiadaviek užívateľa a komunikujú medzi sebou a s BSW vrstvou pomocou RTE, čo znamená, že sú nezávislé od hardvéru, komunikačných zberníc a ostatných softvérových komponentov.
Komunikácia medzi softvérovými komponentami je sprostredkovaná prostredníctvom portov virtuálnej funkčnej zbernice (VFB). Tieto porty tiež uľahčujú komunikáciu medzi softvérovými komponentami a základným softvérom AUTOSAR (BSW).
AUTOSAR Runtime Prostredie (RTE)
AUTOSAR Runtime prostredie je vrstva AUTOSARu, ktorá uskutočňuje komunikáciu medzi softvérovými komponentami v aplikačnej vrstve a BSW. Taktiež samotné softvérové komponenty komunikujú medzi sebou výlučne pomocou RTE, takže sú úplne nezávisle od ECU a ostatných softvérových komponent.
Základný softvér (BSW)
AUTOSAR základný softvér (BSW) vytvára abstrakciu medzi hardvérom a aplikačnou vrstvou. Skladá sa z desiatok softvérových modulov štruktúrovaných v rôznych vrstvách a tie sú rovnaké pre všetky AUTOSAR ECU. To znamená, že dodávateľ, ktorý navrhol konfiguráciu BSW, ju môže zdieľať s inými dodávateľmi, ktorí pracujú na inej ECU napríklad motora, posilňovača riadenia, alebo prevodovky.
BSW sa dá rozdeliť do troch rôznych vrstiev:
- Servisná vrstva: Servisná vrstva je najvyššou vrstvou BSW a poskytuje základné služby (nezávislé na hardvéry) pre aplikačnú vrstvu. Komponenty v aplikačnej vrstve môžu pristupovať k týmto službám cez štandardizované AUTOSAR rozhrania. Servisná vrstva je zodpovedná za služby ako komunikačné služby, pamäťové služby, systémové služby na riadenie stavu ECU, diagnostické služby, operačný systém (OS) a ďalšie.
- Abstraktná vrstva ECU: Hlavnou úlohou abstraktnej vrstvy ECU je spájať vrstvu MCAL a servisnú vrstvu. Vytvára abstrakciu pre prístup ku všetkým perifériám a externým zariadeniam ECU ako komunikácia, pamäť, I/O, tak aby API bolo nezávislé od hardvéru ECU (porty, registre, interné a externé zariadenia atď.).
- Abstraktná vrstva mikrokontroléra (MCAL): MCAL je najnižšia vrstva BSW a priamo pristupuje k registrom a perifériám mikrokontroléra. MCAL je preto veľmi závislí od typu mikrokontroléra a obyčajne sa dodáva priamo jeho výrobcom. MCAL ponúka ovládače, ako komunikačné ovládače (CAN, LIN, ethernet), ovládače I/O, ovládače pamäte, ovládače systému a ďalšie.
Komplexný ovládač zariadenia (CDD)
Komplexný ovládač zariadenia (CDD) sa používa na implementáciu funkcionality mimo BSW, napríklad pre komplexné vyhodnocovanie senzorov, alebo ovládanie aktuátorov, ale najmä pre hardvér, ktorý nie je priamo podporovaný systémom AUTOSAR.
Adaptívny AUTOSAR
Od roku 2003 sa klasický AUTOSAR stal bežnou platformou a veľmi dobre sa mu darilo zrealizovať vozidlá s 60-80 ECU. Avšak, s postupom automobilových trendov založených na IoT, ako napríklad konektivita V2X a autonómna jazda, prudko stúpol počet funkcií vo vozidle a v dôsledku toho sa na trhu vytvoril obrovský dopyt po zariadeniach podporujúcich tieto funkcie. Zistilo sa, že existujúci klasický AUTOSAR nie je vhodný na podporu týchto nových trendov a vyžaduje sa nová architektúra s výkonnejšou a flexibilnejšou architektúrou E/E. Preto pre podporu týchto funkcií bola v Marci 2017 navrhnutá nová architektúra s názvom adaptívny AUTOSAR.
Adaptívny AUTOSAR je škálovateľný a má dynamickú architektúru. Je vyvíjaný pomocou objektovo orientovaného programovacieho jazyka C++ na rozdiel od klasického AUTOSARu, ktorý je založený na programovacom jazyku C. Prichádza s centrálnym aplikačným serverom, ktorý pomáha s náročnými výpočtovými úlohami a taktiež plne podporuje ethernet, ktorý pomáha vykonávať funkcie v reálnom čase. Taktiež umožňuje nasadiť vo vozidle špičkové technológie ako je infotainment, V2X, prediktívna údržba, funkcie ADAS s kamerou, radarové a LIDAR senzory, aktualizácie máp a kedykoľvek ich bezdrôtovo aktualizovať.
Slovo na záver
AUTOSAR je navrhnutý tak, aby našiel využitie v rôznych oblastiach automobilového priemyslu. Ponúka množstvo výhod ako napríklad možnosť znovu použiť už existujúci softvér pre ďalšie ECU, a zároveň tento softvér môže byť opäť kedykoľvek nahradený iným. Ďalšou výhodou je, že poskytuje štandardizované rozhrania, čím zabezpečuje štandardizovaný spôsob vývoja softvéru vo vozidlách. AUTOSAR taktiež obsahuje OS so základnými funkciami, ktorý uľahčuje vývoj softvéru. Užívateľské funkcie sú realizované pomocou softvérových komponentov, ktoré sú nezávisle na hardvéri. Nový adaptívny AUTOSAR je pripravený na podporu nových technologií náročných na výpočtový výkon, takže všetko nasvedčuje tomu, že táto technológia má veľkú perspektívu aj do budúcnosti.
Referencie
- https://www.autosar.org/fileadmin/user_upload/standards/classic/4-3/AUTOSAR_EXP_LayeredSoftwareArchitecture.pdf
- Oliver Scheid, AUTOSAR COMPENDIUM PART 1 – Application & RTE, Edition 1.0.2 based on AR4.0.3, 2015
- https://www.bosch-mobility-solutions.com/en/mobility-topics/ee-architecture/
- https://en.wikipedia.org/wiki/AUTOSAR
- https://circuitdigest.com/article/understanding-autosar-and-its-architecture